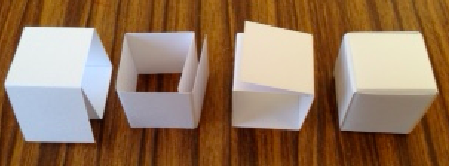
なんだか面白そうだとさっそく作って(編んで)みた. 下の写真がその完成品.
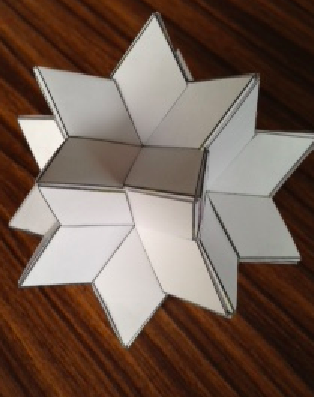
編むというのは糊を使わず, 紙の摩擦だけで固定されているからである. そんなことで菱形六十面体が作れるのかとうのが興味の中心である.
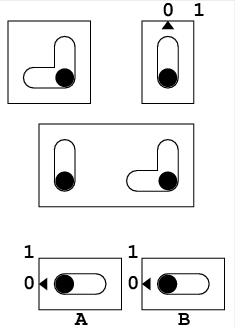
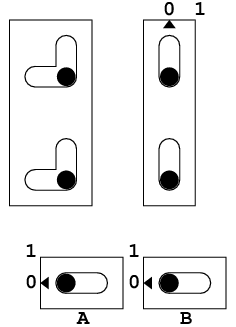
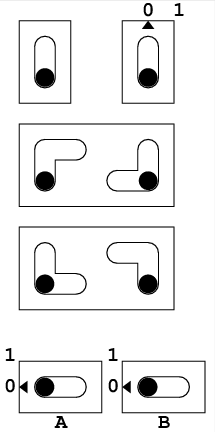
面を1/10にして正六面体で考えてみると, 下の図のように正方形を5枚繋げた(ペントミノの`I'の形)を環状にした帯を3個作り, 左から3個のような方向に置き, 左からx, y, zということにする. xとyの面が重なる手前左方向ではyがxの外に, yとzが重なる右方向ではzがyの外に, zとxが重なる上方向ではxがzの外になるように組み立てると, 右端のような六面体が出来る. いわゆるみすくみ状態になって下の帯を上から抑える構造に出来ている.
菱形六十面体もこの方針で作られいるようだ.
私は元の型紙をダウンロードしたのではなく, PostScriptで書き直し, 少し厚手の紙に印刷し, 山折り谷折りをした後, カッターで帯を1枚ずつ切離し, 裏の番号を写してから組み立てに取り掛かった. 小さいクリップを5個使い, 組み合わさった場所を仮止めしながら進む.
意外な方向に帯が折れていくのに戸惑いながら完成したのがこのブログの最初の写真である. その後, 構造を理解しようと思い, 各面に番号を振ったり分解したり組みなおしたり, 結局3回作った. もちろん後ほど早く完成する.
さて菱形六十面体は, 私の5年ほど前のブログ にあるように, 正十二面体が基本になっている. その12個の正五角形の各面を5枚の黄金比の菱形に置き換えたもので, 面も稜も凹んでいる. 正十二面体の各面を(変形した)菱形にした展開図が下だ. 12の面には白抜きでAからLまで記号があるが, これは元の型紙の12本の帯の左から右へA,B,C,...としたものに対応する.
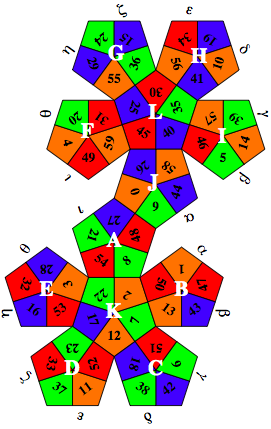
真ん中辺のAの正五角形の外周に, オレンジ色の0,1,2,3,4が見えるが, これが型紙の左端の帯で, 0と1の間は9の下を潜り, 1と2の間は50の下を潜り, 2と3の間は22の下を潜り,...という風になって, 0はJの面の, 1はBの面の, 2はKの面の一部を構成する. つまりAの帯はAに接続する5個の面を作るように出来ている.
そうしてみるとAの帯は, 0, 9, 1, 50, 2, 22, 3, 28, 4, 49の菱形を外に出たり下に潜ったりしてして立体を作ることが分かる. というより, 型紙の各帯の外に面する菱形に, Aには上から0から4, Bには5から9, Cには10から14,.. Lには55から59と番号を付け, その番号を展開図に書き込んだものである. (外周のギリシア小文字は対応する辺同士を示す.)
この番号を型紙に写したのが下の図だ.
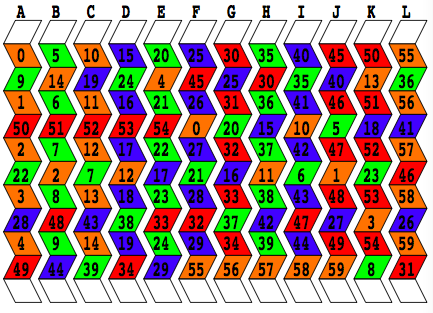
A,B,C,D,Eの帯の上から4段目が左から50,51,52,53,54. F,G,H,I,Jの帯の最下段が左から55,56,57,58,59になっているのは, それぞれKとLの帯の下を潜って, KとLの面の周囲を固めているのである.
ちょっとややこしいのが糊しろの部分で, 正六面体のように簡単ではない. その説明はまたの機会にしたい.
もしかするとこの編み方はこちらが先かもしれない.